This article may reference legacy company names: Continental Mapping, GISinc, or TSG Solutions. These three companies merged in January 2021 to form a new geospatial leader [Axim Geospatial].
There is no shortage of competing technologies in the connected & autonomous vehicle space (see Tesla image sensing vs. essentially the rest of the field supporting lidar sensing).
The debate over platform benefits and shortcomings is spirited as the “emerging” technology advances. One thing that is up for less debate is that, as a general concept, proprietary technologies are developed in walled gardens while open source tech is a shared, collaborative resource with broader reach and more opportunities for development. OpenDRIVE, as its name suggests, is an open source specification for AVs that provides a standard format for describing entire road networks and roadway information. There are a slew of competing formats, but OpenDRIVE benefits as an open source and has large support from the simulation industry.
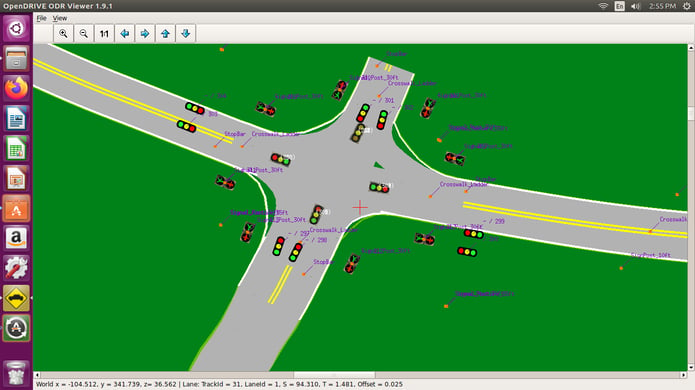
Figure 1. Roadway data in the OpenDRIVE lane model format displayed graphically.
The OpenDRIVE lane model is the base-mapping component ofAVs. It contains a logical description of the road network and roadway information in standardized XML format, serving spatial and contextual data while other systems bolt on to provide real-time analysis of what is happening in the roadway. Though standardized, the format is a complex and unique mapping product – entirely different from the points, lines, and polygons that are typical components of mapping deliverables. The XML code contains road geometry, lane types, junctions and intersections, signs and signals, road surface information, and roadside
objects. The spatial component is relatable to all mapping firms, but the logic and how it is all expressed is an entirely different discipline. The geographic information contained in the lane model’s code is intended to be easily understood by the technology as opposed to looking cartographically pleasing like traditional mapping deliverables.
Axim Geospatial has successfully implemented the OpenDRIVE lane model, from data collection, to processing, to loading and usage within autonomous vehicles. We have extensive mobile mapping experience utilizing mobile lidar and imagery to collect roadway data and develop mapping products (including data that has gone into other AV platforms). As OpenDRIVE is unique to AVs and is not a standard geospatial mapping deliverable, few companies have the full complement of capabilities to collect the data and produce this product. Autonomous vehicles that are using the OpenDRIVE format are currently on the road with Axim’s data.
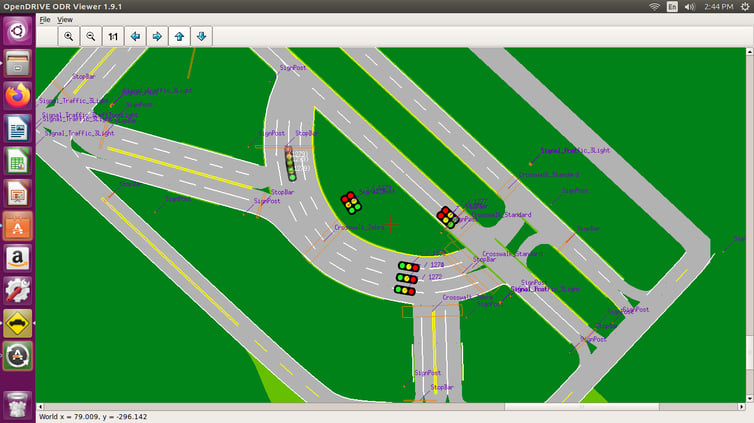 Figure 2. The OpenDRIVE lane model captures complete road network information, including complex geometry.
Figure 2. The OpenDRIVE lane model captures complete road network information, including complex geometry.
Another benefit of being open source is the capability for extension. Through our understanding of developing the mapping products, we have also extended the OpenDRIVE lane model to track additional content of interest. The AV industry, AV consumers, and the general public (in time) will benefit from the extension of the format that we – and others – have and will continue to provide.
The overarching goal of autonomous vehicles is safety. Keeping vehicle occupants safe through the use of technology such as OpenDRIVE is just as relevant to civilians on highways as it is to soldiers in harm’s way. The AV tech is just as applicable in both cases, as is the requirement that reliable data is informing the decision making. Axim has long supplied geospatial data that goes towards keeping troops safe and supports the military’s development and integration of connected and autonomous vehicle systems.
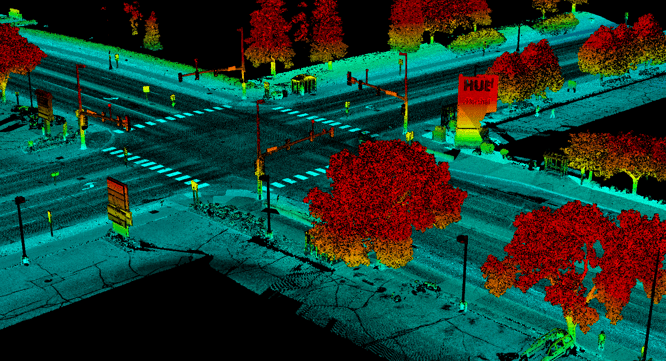 Figure 3. Mobile lidar data, part of our mobile mapping solution, is one of the source data sets from which OpenDRIVE lane models are built.
Figure 3. Mobile lidar data, part of our mobile mapping solution, is one of the source data sets from which OpenDRIVE lane models are built.
Get Started
We hope this article has provided some value to you! If you ever need additional help, don't hesitate to reach out to our team. Contact us today!